(Wind) 6-Dof Quadcoptor Simulation and Control
Introduction
This simulation models the wind disturbance. The purpose is to add in the real world effect. Using the concept in this model, users can further model other real world terms, for example sensor measuring noise and motor output fluctuation.
The wind disturbance is written in the [Force and Environment/ Wind disturb] block. Users can specify any WindLevel, Noise power, Wind sample time to see how the drone behaves under different condition.
Inside Force and Environment subsystem:
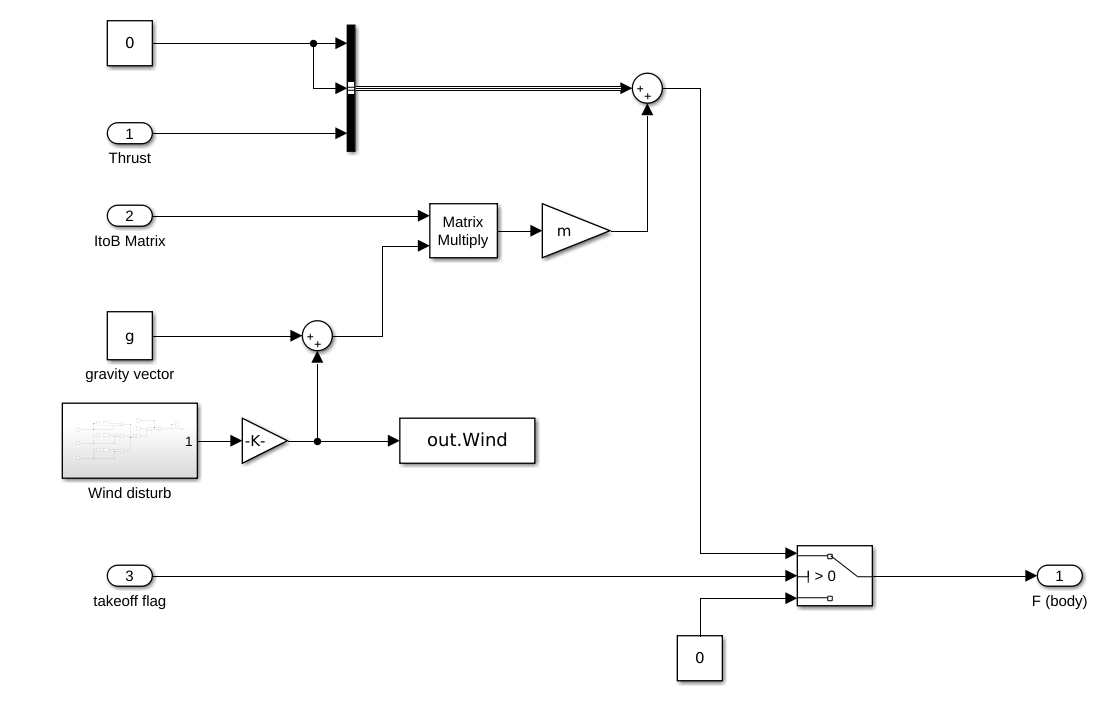
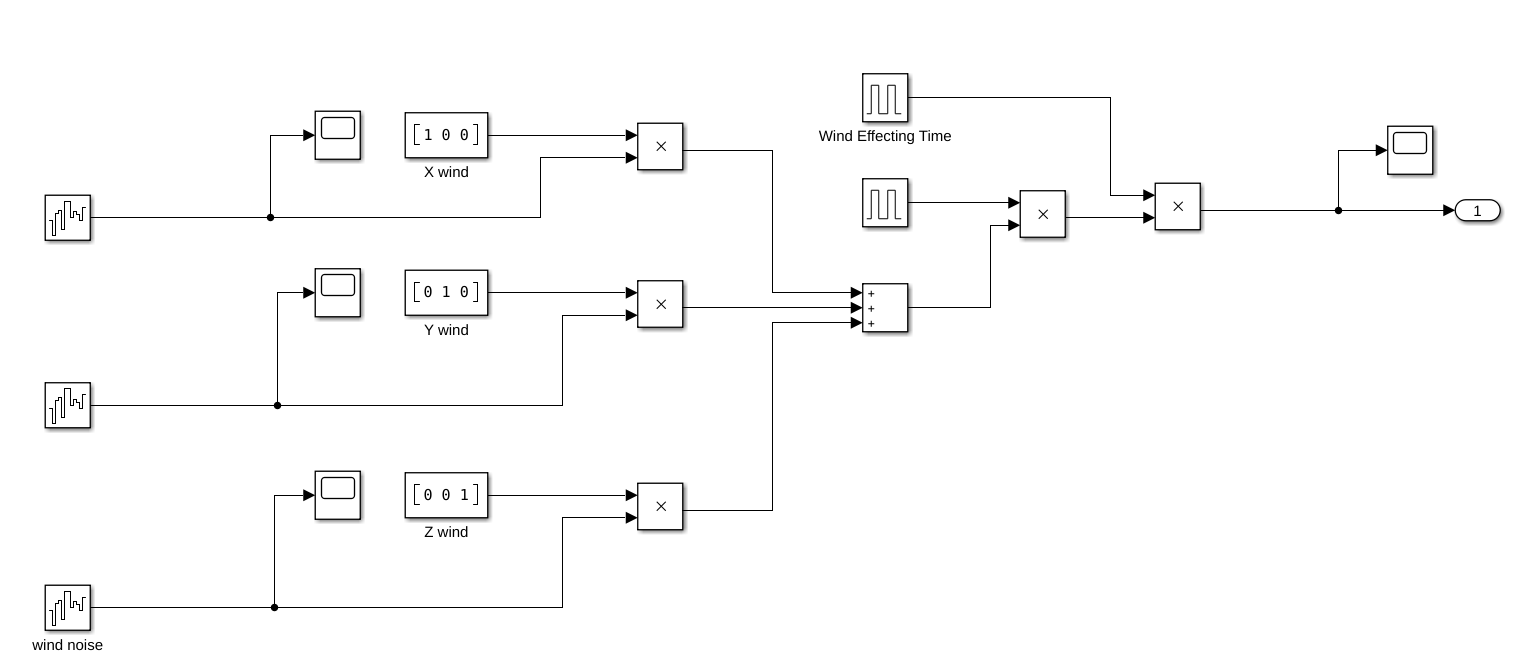
Inside Wind Disturb block:
Demo
WindLevel set from [0 1 5 8 10 11]. Under WindLevel 10, the drone can still stabilize itself, although at WindLevel = 10, the drone actually crashes because its Z position is negative. For WindLevel over 11, the drone can't stabilize anymore.
Steps to Run this Project
- Set the initial values of the drone by running the script SetDroneControl_copt.m
- Open the Simulink Model: DroneControl_WindPID.slx and run it.
- Open the animation script: animation_direct.m and run it to see the result.
Access to MATLAB Project
To get the access to the project, please click on the request button of the google drive link provided below.
I will appreciate if you could tell me your purpose of getting this project file. Thank you very much.
If you want to cite this work, please cite the current journal paper: A Data-Driven Dynamic Obstacle Avoidance Method for Liquid-Carrying Plant Protection UAVs
Project Link